Omar Gadzhievich Omochev*
Dagestan State Medical University, ANO "Center for Social Assistance, Adaptation, Rehabilitation and Habilitation of Children", Russian Federation, Republic of Dagestan, Kaspiysk, Russia
*Corresponding Author: Omar Gadzhievich Omochev, Dagestan State Medical University, ANO "Center for Social Assistance, Adaptation, Rehabilitation and Habilitation of Children", Russian Federation, Republic of Dagestan, Kaspiysk, Russia.
Received: April 18, 2024; Published: April 26, 2024
Citation: Omar Gadzhievich Omochev. “Application of Robotic Technologies for Complex Rehabilitation of Children with Cerebral Palsy”. Acta Scientific Paediatrics 7.5 (2024): 21-24.
Annotation. The ability to move in space is one of the most important motor functions of a living organism. Rehabilitation of patients with movement disorders that have developed as a result of diseases and injuries of the central nervous system is one of the most pressing problems of modern medicine. This is due, first of all, to the high prevalence of both vascular diseases of the brain and injuries to the brain and spinal cord. The most common disabling manifestation of the above-mentioned diseases in children is cerebral palsy. The purpose of the study is to evaluate the effectiveness of medical rehabilitation when conducting locomotor therapy using the “Walkbot” software and hardware robotic complex in combination with the “Reforma” thermoelectric pulse suit in the rehabilitation of children with various forms of cerebral palsy. Material and research methods. At the Center for the Rehabilitation of Children with Cerebral Palsy, medical rehabilitation was carried out for 114 children and adolescents from 1 year to 18 years old, including in the individual medical rehabilitation program classes in robotic mechanotherapy using a hardware complex with biofeedback “Walkbot” and simultaneous combined exposure to pulsed currents using a thermoelectric-pulse suit "Reforma". All children and adolescents, depending on gender, were divided into 66 boys and 48 girls. The average age was 11.6 ± 2.1 years. Results and its discussion. Positive dynamics were observed in all 114 cases. In the majority of patients, as a result of a course of complex effects of locomotor therapy on the hardware-software robotic complex “Walkbot” and the simultaneous combined effects of the TEKT suit “Reforma,” there was an improvement in overall motor activity, a decrease in joint stiffness, a decrease in muscle tone, and an increase in the range of motion in the joints. Also, during classes on the Walkbot robotic complex, children with low independent motor activity showed an increase in active training time by 3-4 times. Positive dynamics were recorded in the total distance traveled on the Walkbot robotic complex in children with a high degree of active motor participation in training. The most pronounced positive dynamics of movement kinematics was recorded in children with spastic forms of cerebral palsy. Conclusions. The introduction of locomotor therapy techniques using the “Walkbot” software and hardware robotic complex and the simultaneous combined influence of the “Reforma” TEKT suit into the complex rehabilitation of children with cerebral palsy significantly accelerates the restoration of basic motor activity skills.
Keywords: Medical Rehabilitation; Cerebral Palsy; Robotic Mechanotherapy; Electric Pulse Influence.
For modern society, cerebral palsy (CP) continues to be a pressing problem. Firstly, the improvement of neonatal care has led to a significant increase in the survival rate of children with severe perinatal lesions of the central nervous system, premature newborns with very low and extremely low birth weight, in whom the risk of developing this nosology is quite high. Secondly, in the Russian Federation, as well as throughout the world, there is an increase in the level of childhood disability, to which cerebral palsy makes a significant contribution. In addition, according to forecasts, further growth of this indicator is expected. Thus, the active pace of development of medicine and the introduction into practice of new methods of caring for newborns have not made it possible to reduce the incidence of cerebral palsy and disability due to cerebral palsy. According to world statistics provided by WHO, the number of children born with a diagnosis of cerebral palsy is 2-3 cases per 1000. In Russia, there are approximately 85 thousand children under 17 years of age with cerebral palsy; annually in our country about 7 thousand children are born with this diagnosis . At the same time, domestic scientists have noted that the prevalence of the disease differs in different regions of the country. Cerebral palsy is a group of stable syndromes with different clinical manifestations that arise as a result of brain dysontogenesis or damage in the early postnatal period of ontogenesis. The clinical picture of the disease is characterized by impaired motor function associated with improper development of statokinetic reflexes, pathology of tone, and paresis. In addition, changes occur secondarily during life in nerve and muscle fibers, joints, ligaments, and cartilage. Various neurological and mental disorders are also often observed [2]. In this regard, the provision of medical assistance for medical rehabilitation to children with cerebral palsy, which includes medical, psychological, social and pedagogical measures, is currently becoming increasingly relevant. Experts argue that with timely diagnosis, the earliest possible and long-term rehabilitation of cerebral palsy, it is quite possible to achieve a significant improvement in the general condition, and consequently, improve the quality of life and socialization of the child. However, there is no single standardized treatment for this serious disease. In recent years, kinesiotherapy using robotic simulators has occupied a strong place in the system of comprehensive rehabilitation of children with various forms of cerebral palsy and paresis of the upper and lower extremities [3].
Purpose of the study -to evaluate the effectiveness of locomotor therapy on the hardware-software robotic complex “Walkbot” (South Korea) and the simultaneous combined use of a thermoelectric pulse simulator suit (TEKT suit) “Reforma” (St. Petersburg, RT LLC) in the rehabilitation of children with various forms Cerebral palsy (“Method of complex treatment of children with cerebral palsy” decision to issue a patent for an invention of the Federal Institute of Industrial Property of the Russian Federation).
Material and research methods.The ANO “Center for Social Assistance, Adaptation, Rehabilitation and Habilitation of Children” provided medical rehabilitation to 110 children and adolescents from 1 to 18 years old, using the “Walkbot” robotic hardware complex and the “Reforma” thermoelectric pulse simulator suit (Picture 1). All children and adolescents, depending on gender, were divided into 66 boys and 48 girls. The average age of the patients was 10.6 ± 2.1 years. Depending on ICD 10, the patients had the following forms of cerebral palsy: spastic cerebral palsy - 12 children, spastic diplegia - 43 children, hemiplegic form - 27 patients, dyskinetic cerebral palsy - 9 patients, ataxic cerebral palsy - 12 patients, another type of cerebral palsy - 8 patients, unspecified cerebral palsy - 3 patients. According to the GMFCS classification of gross motor dysfunction, all children and adolescents were divided as follows: GMFCS I - 19 patients, GMFCS II - 36 patients, GMFCS III - 46 patients, GMFCS IV - 13 patients. According to magnetic resonance imaging of the brain, all patients had varying degrees of impairment of the brain structure and, according to the International Classification of Functioning (ICF), it was coded by domains: s110.1 - mild impairment, s110.2 - moderate impairment, s110.3 - severe degree of impairment. The most common impairments in function, activity and participation were identified in the following ICF domains: joint and bone function (b710-b729), muscle function (b730-b749), motor function (b750-b789), change and maintenance of body position (d410-d429), walking and locomotion (d450-d469).
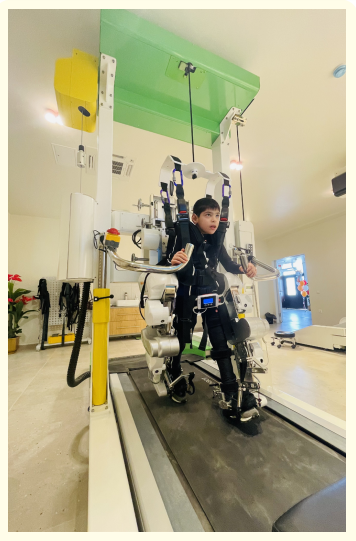
Figure 1
Upon admission, all patients were examined by a multidisciplinary rehabilitation team (MDRT), which included: a physical and rehabilitation medicine doctor, a neurologist, an orthopedic traumatologist, a physiotherapist, a reflexologist, a physical therapist, a speech pathologist, a clinical psychologist, and an occupational therapist. At the MDRC consultation, a rehabilitation diagnosis was established for the patient in ICF categories, rehabilitation potential was determined, an individual medical rehabilitation plan was developed, and goals and objectives were set for rehabilitation. All patients underwent preliminary radiography of the pelvic bones and hip joints to determine contraindications for locomotor therapy. The exclusion criteria in this study were: 1) impairment of gross motor functions according to GMFCS level V; 2) the presence of dislocations and subluxations of one or two hip joints; 3) severe impairment of cognitive functions; 4) lack of contact with the patient.
The rehabilitation program used the complex effects of locomotor therapy on the software and hardware robotic complex “Walkbot” and the simultaneous combined effects of the TEKT suit “Reforma”. The duration of the rehabilitation course was on average 15 days. This rehabilitation program using locomotor therapy on the “Walkbot” software and hardware robotic complex in combination with the “Reforma” TEKT suit allows you to teach the patient the correct step pattern, as well as solve partial problems: stimulate the functions of weakened muscles, reduce pathological muscle hypertonicity and ensure physiological mobility in the joints. With the help of the Walkbot robotic complex, you can train the ability to measure and regulate spatial, temporal and dynamic parameters of movements, develop coordination abilities, promote the development of attitudinal reflexes, on the basis of which movement skills are formed (the ability to walk and step over obstacles, etc.).
The procedure for practicing robotic mechanotherapy with the simultaneous combined influence of the Reforma TEKT suit is as follows. With the help of a physiotherapist, the patient is put on the Reforma TEKT suit, which has individual parameters depending on the patient’s height. On the inner surface of the Reforma TEKT suit, directly adjacent to the surface of the body, there are electrodes through which the muscles are exposed to pulsed current. Before each procedure, an individual program is recorded on the software block of the Reforma TEKT suit, which includes a stimulating effect on atonic muscles or a relaxing effect on spastic muscles. Then the patient in the Reforma TECT suit is installed in the robotic hardware-software complex for locomotor mechanotherapy “Walkbot”, in which he performs cyclic stereotypical locomotor acts of the legs, which contributed to the modeling of the spatiotemporal organization (pattern) of neuromuscular activity. In all cases, the patient was unloaded by approximately 50% of body weight to create conditions for more physiological walking.
Depending on the child’s capabilities, the passive nature of the exercises could be maintained until the child mastered the task. The initial duration of classes ranged from 15 to 40 minutes, with a gradual increase in time and intensity of exercise up to 60 minutes. The duration of the course varied from 10 to 15 training sessions. On average, a child walked 5863 meters per course. Regular exercises on a robotic simulator helped to strengthen paretic muscles, enhance their trophism, improve metabolic processes in them, restore impaired motor functions, and also improve the emotional state of the patient. Taking into account the age of the children and their not very high endurance and perseverance, alternating training of the lower extremities with rest was carried out. The therapy was based on play forms. Rehabilitation was adapted to the child’s individual developmental level, focusing on his strengths and needs.
To assess the results of rehabilitation, all patients before and after the course of treatment were assessed for general motor status, as well as testing using the GMFM 66/88, MACS, Ashworth, and Tardieu scales. Positive dynamics were observed in all 114 cases. In the majority of patients, as a result of a course of complex effects of locomotor therapy on the hardware-software robotic complex “Walkbot” and the simultaneous combined effects of the TEKT suit “Reforma,” there was an improvement in overall motor activity, a decrease in joint stiffness, a decrease in muscle tone, and an increase in the range of motion in the joints. Also, during classes on the Walkbot robotic complex, children with low independent motor activity showed an increase in active training time by 3-4 times. Positive dynamics were recorded in the overall performance daily path on the robotic complex “Walkbot” in children with a high degree of active motor participation in training. The most pronounced positive dynamics of movement kinematics was recorded in children with spastic forms of cerebral palsy.
During a survey of parents of patients undergoing rehabilitation, it was found that half of the children, already by the tenth procedure of the course of treatment, attempted controlled movements in those limbs that were trained on the simulator. After completing the course, patients more actively mastered such complex motor acts as crawling and walking. As a result of the training, children’s orientation in space, body verticalization, and support on their hands improved. As a result of muscle strengthening, children began to hold their backs straighter and their posture improved. If the dosage of loads and all safety rules were observed during training on the Walkbot robotic complex, no side effects were noted. Subject to the principles of continuity and phasing of rehabilitation at the time of discharge from the center, the acquired positive results persisted in the majority of children for a long time.
With the complex effect of locomotor therapy on the software and hardware robotic complex “Walkbot” and the simultaneous combined effect of the TEKT suit “Reforma” in the complex rehabilitation of children with cerebral palsy, 114 children (100%) showed an improvement in indicators of general motor activity, a decrease in stiffness of movements (as a result of a decrease in stiffness of joints), stabilization of support ability, which is necessary for the formation of a natural pattern of movement and body position. Exercises on a robotic simulator allow patients to remain upright for as long as possible. Using a robotic simulator, you can perform exercises that stimulate the functions of weakened muscles and joints of the lower extremities. Thanks to the regulation of the load level, children with varying degrees of motor impairment were able to move freely in space in any direction, as well as rotate around their own axis. At the same time, the load on the musculoskeletal system is controlled, the vertical position is maintained, the movements of the arms and legs are not limited, at the same time, the child is insured against injuries and falls. The introduction of locomotor therapy techniques using the “Walkbot” software and hardware robotic complex and the simultaneous combined influence of the “Reforma” TEKT suit into the complex rehabilitation of children with cerebral palsy significantly accelerates the restoration of basic motor activity skills. During follow-up, all patients retained their acquired skills for a long time.
Copyright: © 2024 Omar Gadzhievich Omochev. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.




 Open Access by
Acta Scientific is licensed under a Creative Commons Attribution 4.0 International License
Open Access by
Acta Scientific is licensed under a Creative Commons Attribution 4.0 International License
Based on a work at https://actascientific.com
ff
ff
© 2024 Acta Scientific, All rights reserved.